During the Spring 2021 semester, I joined the F1Tenth team at Penn to conduct an interest project on multi-vehicle coordination. To get prepared for the project, I self-learned and completed Lab 1, 2, 3, 4, and 6 of the “F1Tenth” course.
Overview
This post contains my results for Lab 2, where an automatic emergency brake is implemented for the race car so that it will be stopped before crashing into anything. See the video below for a demonstration of the automatic emergency brake:
Demonstration
Procedure
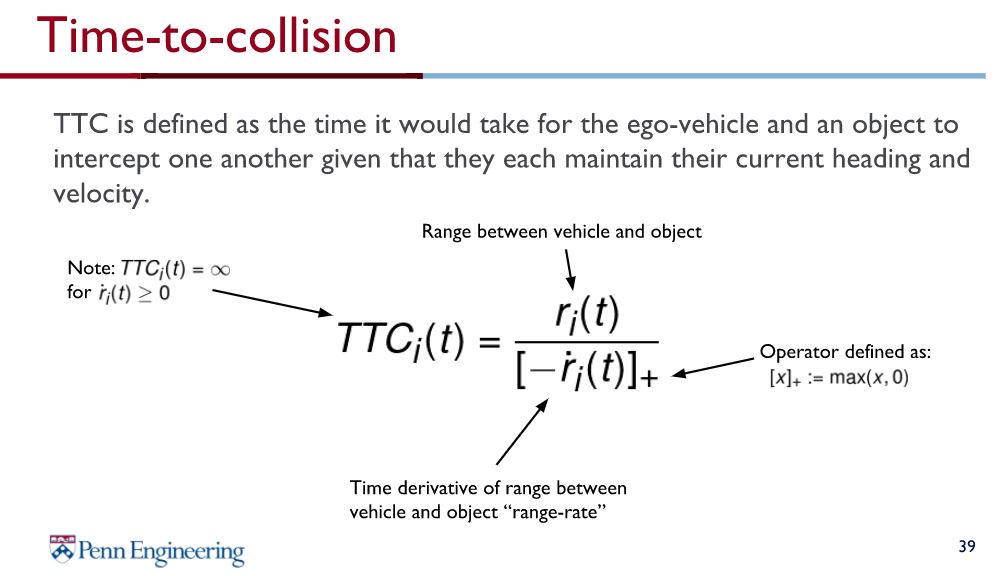
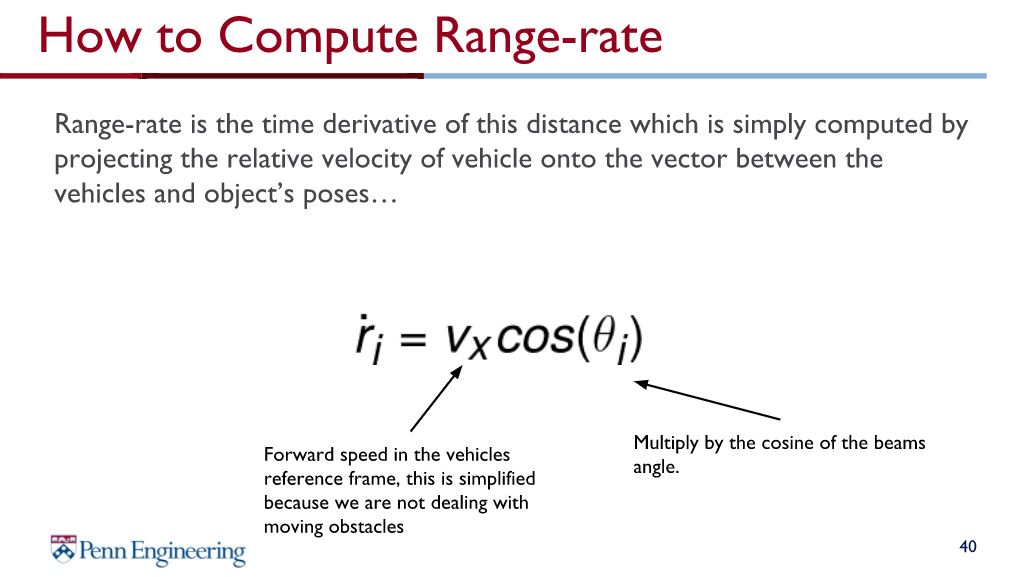
I predicted the vehicle’s time to collision (TTC) in all directions with its current motion (from its odometry information) and its distance to obstacles (from the 2d-lidar scan information). The automatic emergency brake will stop the vehicle if the minimum TTC is below a certain threshold. The slides below shows the equation for calculating TTC:
More technical details can be found in the below prompt document:
My source codes for this lab can be found on github through this link.
Reference
The lecture video can be found below: